
我的挑战是在另一个矩形内旋转一个矩形。
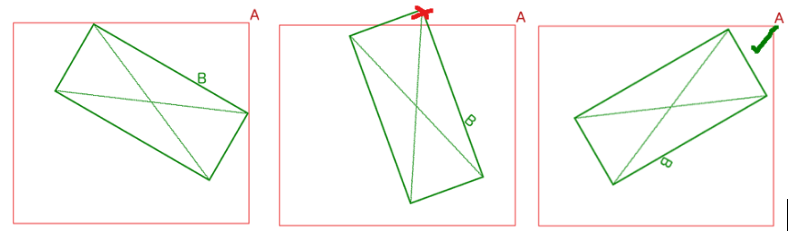
内部矩形,我们称之为B,不允许穿过外部矩形,我们称之为A。但是如果A进一步旋转,以便它可能再次到达合法位置,它应该被旋转到它。所以想要的行为是在它越过边界之前停止旋转,并在B再次具有合法位置时继续旋转。B是用鼠标旋转的,可能不是每一个度数都额外计算。所以鼠标事件可能指向20度,在下一次迭代中指向40度。
我的方法是通过计算和使用旋转来解决这个问题。我得到了指向鼠标的alpha旋转。Beta是从alpha到B的右上角的旋转。我计算了边界球(橙色)及其与A的碰撞点(左上角,右上角,右上角,右下角(左和Bot没有提到,以免使问题复杂化)。
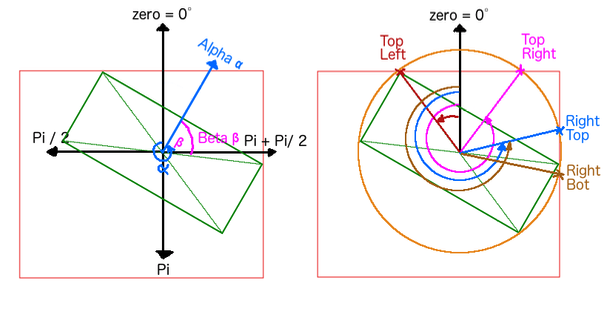
通过这种方法,我设法计算出何时必须停止,但仅限于顶部和右侧分开。例如:顺时针旋转-
If (B.leftTopCornerRotation < TopLeft || B.leftTopCornerRotation > TopRight) {
Alpha = TopLeft - Beta;
} else if (B.leftBotCornerRotation < TopLeft || B. leftBotCornerRotation > TopRight) {
Alpha = Topleft + Beta + PI; // + PI rotates the value by 180 degree
} else if (B.rightBotCornerRotation < TopLeft || B. rightBotCornerRotation > TopRight) {
Alpha = TopLeft - Beta + PI;
} else if (B.rightTopCornerRotation < TopLeft || B. rightTopCornerRotation > TopRight) {
Alpha = TopLeft + Beta;
}
我的第一个问题是,如果B在不止一条线上出界(例如顶部和右侧),我会纠正旋转,这样右侧就没有越界,而不是纠正顶部没有越界。但是第二次纠正会导致右侧越界。这将导致一个无限循环。
我的第二个问题是,这种方法接缝真的很复杂。
我的问题是,如果有更好的/有效的方法来计算顺时针和逆时针方向的有效旋转,这样它就不会越过边界。最好的情况是它看起来像停在拐角处。
对于每个B角,当它位于每个A边(为简单起见无限边)之外时,查找角度间隔。
然后对这16个区间进行并集(如果B不大,其中大部分应该为空),并从整个圆范围中排除结果区间集。
