
使用这个答案来创建一个分割程序,它不正确地计算了对象。我注意到单独的对象被忽略或成像采集不良。
我计算了123个对象,程序返回117个,可以看出,如下所示。用红色圈出的对象似乎不见了:
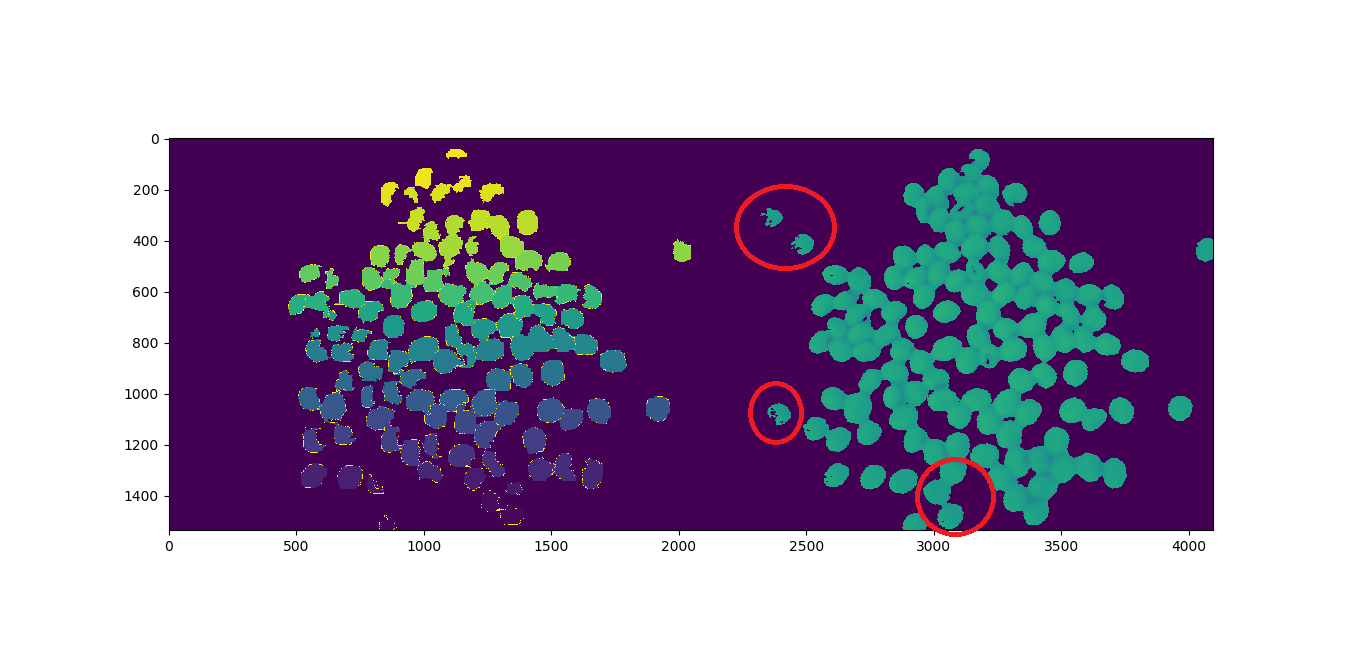
使用来自720p网络摄像头的以下图像:

import cv2
import numpy as np
import matplotlib.pyplot as plt
from scipy.ndimage import label
import urllib.request
# https://stackoverflow.com/a/14617359/7690982
def segment_on_dt(a, img):
border = cv2.dilate(img, None, iterations=5)
border = border - cv2.erode(border, None)
dt = cv2.distanceTransform(img, cv2.DIST_L2, 3)
plt.imshow(dt)
plt.show()
dt = ((dt - dt.min()) / (dt.max() - dt.min()) * 255).astype(np.uint8)
_, dt = cv2.threshold(dt, 140, 255, cv2.THRESH_BINARY)
lbl, ncc = label(dt)
lbl = lbl * (255 / (ncc + 1))
# Completing the markers now.
lbl[border == 255] = 255
lbl = lbl.astype(np.int32)
cv2.watershed(a, lbl)
print("[INFO] {} unique segments found".format(len(np.unique(lbl)) - 1))
lbl[lbl == -1] = 0
lbl = lbl.astype(np.uint8)
return 255 - lbl
# Open Image
resp = urllib.request.urlopen("https://i.stack.imgur.com/YUgob.jpg")
img = np.asarray(bytearray(resp.read()), dtype="uint8")
img = cv2.imdecode(img, cv2.IMREAD_COLOR)
## Yellow slicer
mask = cv2.inRange(img, (0, 0, 0), (55, 255, 255))
imask = mask > 0
slicer = np.zeros_like(img, np.uint8)
slicer[imask] = img[imask]
# Image Binarization
img_gray = cv2.cvtColor(slicer, cv2.COLOR_BGR2GRAY)
_, img_bin = cv2.threshold(img_gray, 140, 255,
cv2.THRESH_BINARY)
# Morphological Gradient
img_bin = cv2.morphologyEx(img_bin, cv2.MORPH_OPEN,
np.ones((3, 3), dtype=int))
# Segmentation
result = segment_on_dt(img, img_bin)
plt.imshow(np.hstack([result, img_gray]), cmap='Set3')
plt.show()
# Final Picture
result[result != 255] = 0
result = cv2.dilate(result, None)
img[result == 255] = (0, 0, 255)
plt.imshow(result)
plt.show()
如何统计丢失的对象?
回答您的主要问题,分水岭不会删除单个对象。分水岭在您的算法中运行良好。它接收预定义的标签并相应地执行分割。
问题是您为距离变换设置的阈值太高,它消除了单个对象的弱信号,从而阻止了对象被标记并发送到分水岭算法。
距离变换信号弱的原因是颜色分割阶段分割不当,难以设置单一阈值去除噪声和提取信号。
为了解决这个问题,我们需要执行适当的颜色分割,并在分割距离变换信号时使用自适应阈值而不是单个阈值。
这是我修改的代码。我在代码中结合了@user1269942的颜色分割方法。额外的解释在代码中。
import cv2
import numpy as np
import matplotlib.pyplot as plt
from scipy.ndimage import label
import urllib.request
# https://stackoverflow.com/a/14617359/7690982
def segment_on_dt(a, img, img_gray):
# Added several elliptical structuring element for better morphology process
struct_big = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
struct_small = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(3,3))
# increase border size
border = cv2.dilate(img, struct_big, iterations=5)
border = border - cv2.erode(img, struct_small)
dt = cv2.distanceTransform(img, cv2.DIST_L2, 3)
dt = ((dt - dt.min()) / (dt.max() - dt.min()) * 255).astype(np.uint8)
# blur the signal lighty to remove noise
dt = cv2.GaussianBlur(dt,(7,7),-1)
# Adaptive threshold to extract local maxima of distance trasnform signal
dt = cv2.adaptiveThreshold(dt, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 21, -9)
#_ , dt = cv2.threshold(dt, 2, 255, cv2.THRESH_BINARY)
# Morphology operation to clean the thresholded signal
dt = cv2.erode(dt,struct_small,iterations = 1)
dt = cv2.dilate(dt,struct_big,iterations = 10)
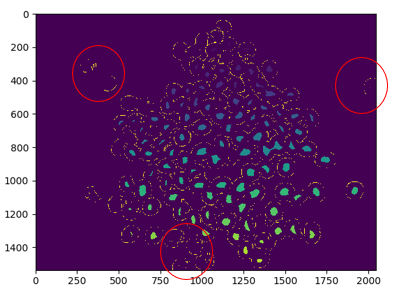
plt.imshow(dt)
plt.show()
# Labeling
lbl, ncc = label(dt)
lbl = lbl * (255 / (ncc + 1))
# Completing the markers now.
lbl[border == 255] = 255
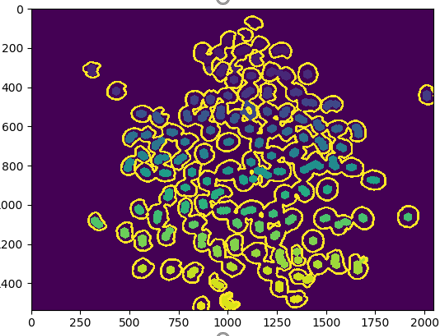
plt.imshow(lbl)
plt.show()
lbl = lbl.astype(np.int32)
cv2.watershed(a, lbl)
print("[INFO] {} unique segments found".format(len(np.unique(lbl)) - 1))
lbl[lbl == -1] = 0
lbl = lbl.astype(np.uint8)
return 255 - lbl
# Open Image
resp = urllib.request.urlopen("https://i.stack.imgur.com/YUgob.jpg")
img = np.asarray(bytearray(resp.read()), dtype="uint8")
img = cv2.imdecode(img, cv2.IMREAD_COLOR)
## Yellow slicer
# blur to remove noise
img = cv2.blur(img, (9,9))
# proper color segmentation
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv, (0, 140, 160), (35, 255, 255))
#mask = cv2.inRange(img, (0, 0, 0), (55, 255, 255))
imask = mask > 0
slicer = np.zeros_like(img, np.uint8)
slicer[imask] = img[imask]
# Image Binarization
img_gray = cv2.cvtColor(slicer, cv2.COLOR_BGR2GRAY)
_, img_bin = cv2.threshold(img_gray, 140, 255,
cv2.THRESH_BINARY)
plt.imshow(img_bin)
plt.show()
# Morphological Gradient
# added
cv2.morphologyEx(img_bin, cv2.MORPH_OPEN,cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(3,3)),img_bin,(-1,-1),10)
cv2.morphologyEx(img_bin, cv2.MORPH_ERODE,cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(3,3)),img_bin,(-1,-1),3)
plt.imshow(img_bin)
plt.show()
# Segmentation
result = segment_on_dt(img, img_bin, img_gray)
plt.imshow(np.hstack([result, img_gray]), cmap='Set3')
plt.show()
# Final Picture
result[result != 255] = 0
result = cv2.dilate(result, None)
img[result == 255] = (0, 0, 255)
plt.imshow(result)
plt.show()
最终结果:找到124个独特的项目。发现了一个额外的项目,因为其中一个对象被分成2。通过适当的参数调整,你可能会得到你正在寻找的确切数字。但是我建议买一个更好的相机。
看看你的代码,它是完全合理的,所以我只想提出一个小建议,那就是使用HSV颜色空间来做你的“inRange”。
关于颜色空间的OpenCV文档:
https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_imgproc/py_colorspaces/py_colorspaces.html
另一个将inRange与HSV一起使用的SO示例:
如何检测两种不同的颜色使用'cv2. inRange'在Python-OpenCV?
并为您进行小代码编辑:
img = cv2.blur(img, (5,5)) #new addition just before "##yellow slicer"
## Yellow slicer
#mask = cv2.inRange(img, (0, 0, 0), (55, 255, 255)) #your line: comment out.
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) #new addition...convert to hsv
mask = cv2.inRange(hsv, (0, 120, 120), (35, 255, 255)) #new addition use hsv for inRange and an adjustment to the values.
检测丢失的物体

im_1im_2im_3
我数了12个丢失的物体:2、7、8、11、65、77、78、84、92、95、96。编辑:85也是
发现117个,失踪12个,错6个
1°尝试:降低面具敏感度
#mask = cv2.inRange(img, (0, 0, 0), (55, 255, 255)) #Current
mask = cv2.inRange(img, (0, 0, 0), (80, 255, 255)) #1' Attempt
inRange文档
im_4im_5im_6im_7
[INFO] 120 unique segments found
找到120,少9,错6
