
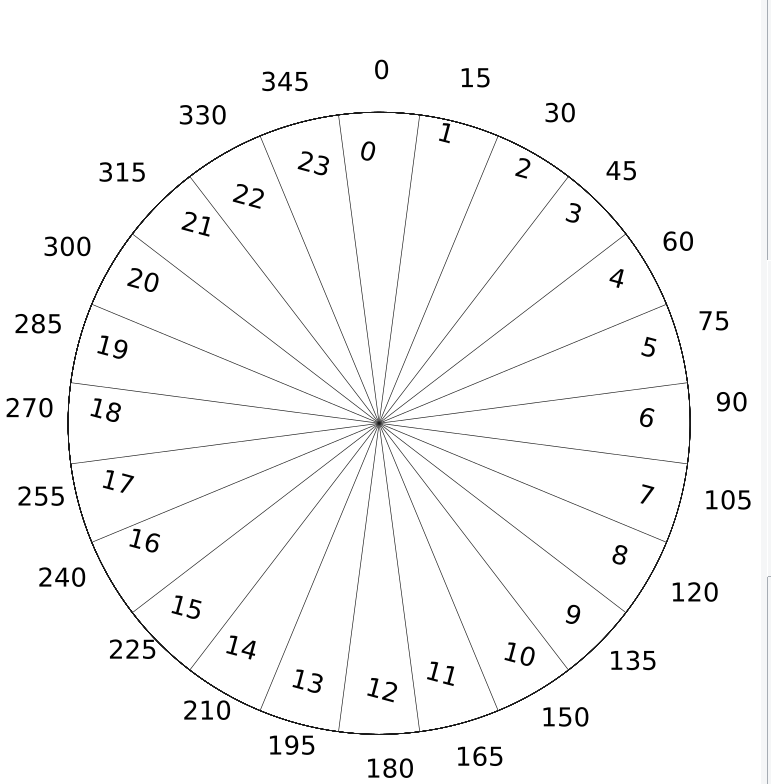
我有一个功能,控制在什么方向和多少档次转动电机。旋转电机(度,速度)正向度为顺时针方向移动,负向为逆时针方向移动。
我正在尝试创建一个函数,将原始度数和目标度数作为参数(例如15到345),并返回-30
这个应该没问题
diff=lambda x,y:(y-x如果x
例如-
打印(diff(15345))
简化版-
def diff_-fun(x,y):如果abs(x-y)
print(diff_-fun(30,15))
-15个
abs用于查找绝对值
最后我自己用这个函数算出了。我认为这是正确的。
def calcPath(起点、终点):
if abs(destination - origin) <= 180:
return (destination - origin)
else:
degrees = 360 - abs(destination - origin)
if destination < 180:
return degrees
else:
return -degrees
